The Fourth Industrial Revolution is a way of describing the blurring of boundaries between the physical, digital, and biological worlds. It’s a fusion of advances in artificial intelligence (AI), robotics, the Internet of Things (IoT), 3D printing, genetic engineering, quantum computing, and other technologies. It’s the collective force behind many products and services that are fast becoming indispensable to modern life
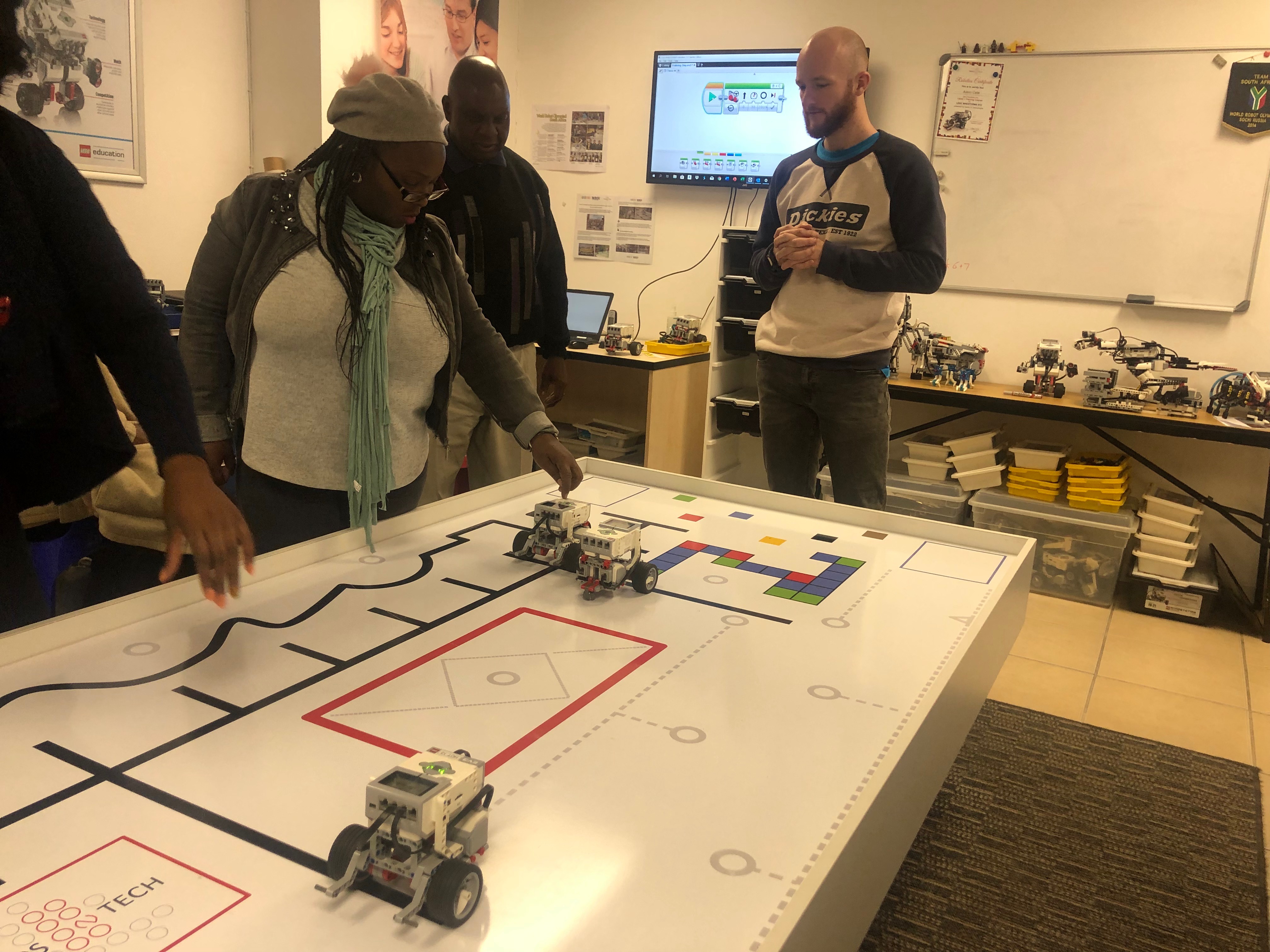
The Maths Centre took its staff members to experience learning in another world (The digital world): The training was hands-on as trainers were given each a Moto/EV3 Brick, set of sensors and connectors and Sensors. After each lesson, trainers were to do a task in order to experience and understand through practice. The training was mainly about the understanding of basic functions in assigning task and operating a robot. The EV3 Brick/Motor and its functions were explored. Trainers were showed how to programme using a computer, then download the programme to the EV3 Brick to execute the task on the Map-Sheet. Trainers were trained on how to programme the robot to move forward, turn left or right and stop.
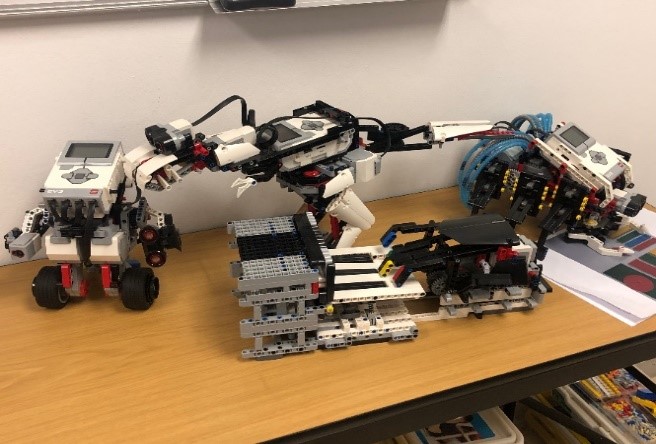
The EV3Brick/ Motor
EV3 Brick + Serves as the control centre and power station for the robot. The display shows what is going on inside the EV3 Brick and enables to use of the Brick Interface. It also allows adding text and numerical or graphic responses into the programming or experiments. For example, you might want to program the display to show a happy face (or a sad face) for a comparison response or to display a number that is the result of a mathematical calculation The Brick Buttons allow navigation inside the EV3 Brick Interface. They can also be used as programmable activators.
The EV3 shows the Battery level
USB connection established to another device from the EV3 Brick
Brick Buttons 1
This button is used to reverse actions, to abort a running program, and to shut down the EV3 Brick press Brick Button 2
Centre Pressing the Centre button says ‘OK’ to various questions – to shut down, to select desired settings, or to select blocks in the Brick Program App. You would, for example, press this button to select a checkbox
Brick Button 3
Left, Right, Up, Down These four buttons are used to navigate through the contents of the EV3
Trainers were experienced different sensors used to start an action or stop action.
Ultrasonic Sensor: It is a digital sensor that can measure the distance to an object in front of it. It does this by sending out high-frequency sound waves and measuring how long it takes the sound to reflect back to the sensor. The sound frequency is too high for the human ear to hear. Distance to an object can be measured in either inches or centimeters. This allows programming the robot to stop from a certain distance from a wall. When using centimeter units, the detectable distance is between 3 and 250 centimeters (with an accuracy of +/- 1 centimeter). When using inch units, the measurable distance is between 1 and 99 inches (with an accuracy of +/- 0.394 inches). A value of 255 centimeters or 100 inches means the sensor is not able to detect any object in front of it.
A steady light around the sensor eyes tells you that the sensor is in Measure Mode. A blinking light tells you that it is in Presence Mode.
In Presence Mode, this sensor can detect another Ultrasonic Sensor operating nearby. When listening for presence, the sensor detects sound signals but does not send them.
The Ultrasonic Sensor can help the robots avoid furniture, track a moving target, detect an intruder in your room, or ‘ping’ with increasing volume or frequency as an object gets closer to the sensor
Touch Sensor: It recognizes three conditions – touched, bumped, and released.
Colour Sensor: It recognizes seven different colours and measures light intensity. The digital Colour Sensor can detect the colour or intensity of any light that passes through its lens. This sensor can be used in three different modes: Colour Mode, Reflected Light Intensity Mode, and Ambient Light Intensity Mode.
In Colour Mode, the Colour Sensor recognizes seven colours – black, blue, green, yellow, red, white, and brown – plus No Colour. This ability to differentiate between colours means your robot might be programmed to sort coloured balls or blocks, speak the names of colours as they are detected, or stop action when it sees red.
In Reflected Light Intensity Mode, the Colour Sensor measures the intensity of light reflected back from a red light-emitting lamp. The sensor uses a scale of 0 (very dark) to 100 (very light). This means the robot might be programmed to move around on a white surface until a black line is detected or to interpret a colour-coded identification card.
In Ambient Light Intensity Mode, the Colour Sensor measures the strength of light that enters the window from its environments, such as sunlight or the beam of a torch. The sensor uses a scale of 0 (very dark) to 100 (very light). This means the robot might be programmed to set off an alarm when the sun rises in the morning, or stop the action if the lights go out.
Connecting Sensors and Motors
In order to function, Motors and Sensors must be connected to the EV3 Brick.
One can use the flat black Connector Cables to link sensors to the EV3 Brick using Input Ports 1, 2, 3, and 4.
The flat black Connector Cables are used to link motors to the EV3 Brick using Output Ports A, B, C, and D.
Connecting the EV3 Brick to Your Computer
USB Cable Using the USB cable, plug the Mini-USB end into the EV3 Brick’s PC port (located next to Port D). Plug the USB end into your computer.
The training was information and an experience to all of the trainers. Everyone was actively involved and expressed a hunger for more: